Rancho la Azufrosa, Aldama, Tamaulipas, Mexico
Reporting from Zacaton Basecamp
Science Payload Powers Up:
We continued with vertical powered exploration profiles today, reaching a maximum depth of -98 m in cenote La Pilita. During this time we also tested the Science Payload wide-field camera at several depths and got our first look at the bottom of La Pilita, where, in true planetary robotic tradition, features began to acquire names, such as the “Iguana Rock” shown below.

Above: The eye of the bot-wide field camera on the Science Payload for DEPTHX.

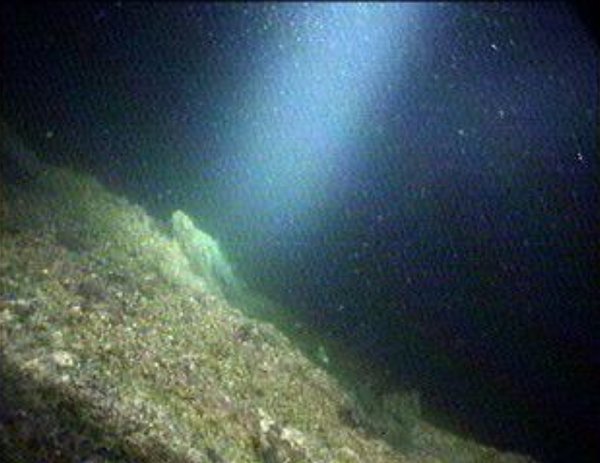
Above: Bio film on the wall of cenote La Pilita at a depth of -12m.
Above: “The Iguana” rock on the bottom of La Pilita at a depth of -105m.

Above: Nathaniel Fairfi eld gets to experience the world of the bot (at shallow depth).

Above: The busy world of Mission Control at cenote La Pilita.
This evening Alejandro Davila picked up SwRI researchers Tom Lyons and Ian Meinzen who will be with us for the remainder of Mission 1 to tend to hardware and software relating to the Science Payload. Below is appended Dave Wettergreen’s summary of the technical results from February 7.
Bill Stone
Stone Aerospace
Tecnical Status and Progress – February 6
- Tested proximity operations. The robot typically tries to stay away from the walls, but in order to take images and collect samples it must move into close proximity of the wall and then position steadily (stationkeeping) to move along a transect. Proximity operations is our term for this mode. Not surprisingly La Pilita presents a much more complex geometry than the smooth walls of a test tank. The algorithm fits a surface to a collection of forward sonar range measurements and then tries to control the vehicle’s thrusters to move to a point relative to the vehicle (for example its probe tip) along the wall. When the wall has concavities and convexities, the tracking point can jump around or not move at all as the vehicle moves. To correct for this, the vehicle might move erratically. This is not a desirable behavior so we modified the algorithm to instead drive the vehicle smoothly and then reacquire a point on the wall. This was tested in a number of locations in la Pilita and we are now able to get the vehicle into position for science investigations of the complex geometry of la Pilita’s walls.
- Collect sonar data. It is important to characterize the performance of the sonars on the robot. We weighted the vehicle down (making it negatively buoyant) and then hung it at 22m and 42m depth to collect sonar data. In particular we adjusted the gain on the sonars, the maximum range, and low pass filtering. By hanging statically in the water we were able to see when the sonars were returning consistent (and believable) ranges. We adjusted all the major parameters to a variety of settings, trying to bracket the best values. There is no one perfect setting because each transducer behaves slightly differently—we have 32 of the 100m sonars and 24 of the 200m sonars so we were looking for a best overall performance. We think we’ve found that and furthermore have got settings that should work in Zacatón as well.
- Dropped to the bottom. With the sonars tuned we dropped the vehicle to the bottom of la Pilita, again on a tether for safety. We dropped in a different location and reached the bottom at 98.3m. This time we had added dive lights and so we took pictures of the bottom including a rock we called the iguana. The robot actually touched down gently. Using the live visual image (something we won’t have when we remove the fiber optic real-time data upload cable and go fully autonomous and un-tethered) we used the thrusters to hop around on the bottom. On this second drop to the bottom and return up we collected a second complete sonar data set of the cenote which we will use to build an even more accurate map.
Dave Wettergreen
Carnegie-Mellon University