Rancho la Azufrosa, Aldama, Tamaulipas, Mexico
Reporting from Zacaton Basecamp
Agenda
- Test reactive resurfacing behavior
- Execute multigoal dive with contingency plan
- Tune proximity operations parameters
- Exercise science payload
Status and Progress
- Tested reactive resurfacing behavior. When the robot detects any type of fault (like low battery, high temperature, process crash, or unexpected obstacle) is aborts its current plan and returns to the surface. In the simplest implementation, the robot runs its vertical thrusters and heads straight up. Very often this works fine, but in an environment like la Pilita which is shaped like a vase, it can run into the bottom of an overhanging ledge. It might still bounce around enough to eventually pop out through the opening, but maybe not. We have been testing a variety of algorithms for reactively moving away from walls or towards free space while also moving upwards. This behavior is reactive because it does not rely on any prior information or even knowledge of where the robot is located. Getting this to work reliably has involved deciding how far to stay away from walls, how rapidly (or forcefully) to move away, and what rate to ascend. After trying several schemes we settled upon a method based on repelling away from walls at rate inversely proportional to distance. We then set about testing this by getting progressively deeper and farther underneath the ledge. Eventually the robot was returning on its own from depths of 50m while more than 15m back underneath a ledge.
- Execute multigoal dive with contingency plan. Continuing on work from Wednesday we executed several 30 minute dives that involved navigating down to deeper areas where we have sparse sonar data and scanning intensely to try to collect enough readings to determine whether there is a tunnel present. These multigoal plans take the robot to the depths of la Pilita and must return on schedule otherwise the contingency plan is invoked and the robot begins to return home automatically.
- Tune proximity operations parameters. We continued refining the proximity operations behaviors and in particular worked on enabling the robot to move smoothly along walls while maintaining a constant standoff distance. It is now able to stationkeep quite steadily but motion relative to the wall can become erratic for very rough or fractured walls. We also observed that the robot sometimes drifts upward along an inclined wall. Work will continue on this after rethinking the current formulation.
- Exercise science payload. We performed our first sampling operations at depth just at dusk today. While at 50m and back along a wall beneath a 15m ledge, we directly commanded deployment of the sampling arm and pressed the vehicle forward against the wall to fire the coring mechanism. We also drew in water samples of the material that was stirred up, and of course took images. The core came back with a bit of wall material although not a complete core. The next step will be to integrate some of these science activities along with proximity operations into a longer multigoal plan.
Dave Wettergreen
Carnegie Mellon University Robotics Institute
Above: Probe Arm – Solid Sample Collection.

Above: This small pile of soft sediment was collected at a depth of 50 meters in the cenote La Pilita 40 meters back under the cave edge. The sample was collected by the solid core sample device on the end of the sample arm.

Above: Biogenic mineral crystal from the walls of La Pilita fell into the frame of the DEPTHX robot during a deep mission. These crystals are thought to be forming through biologic mediated processes.

Above: A top view of the DEPTHX robot with the sampling arm extending to test the operation of the solid core sample device. The coring devise is the gray cylinder at the front of the probe.

Above: A four-inch purple scorpion was found on the trail walking back from La Pilita. These scorpions are common in the caves nearby.
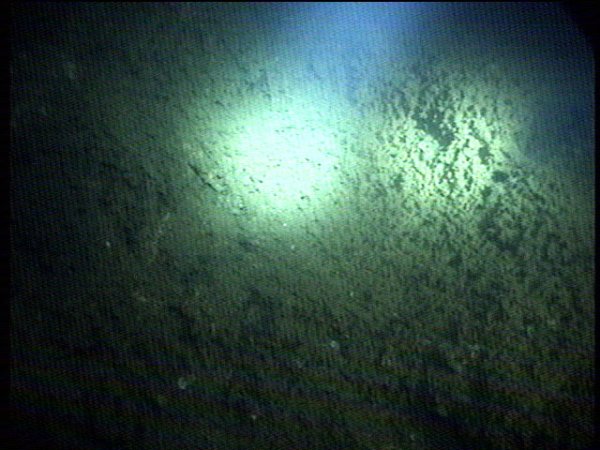
Above: Image taken with the stage 1 camera on the DEPTHX robot of the wall 50 meters deep in the cenote La Pilita. The texture of the wall is likely due to biogenic mineralization of crystals.