
THOR: Thermal High-voltage Ocean-penetrator Research platform

Artist rendering of THOR concept
THOR is a prototype for a new class of exploration vehicle which combines elements of an ice-penetrator (cryobot) and an ocean-profiler (sonde) for future Ocean Worlds exploration.
The full THOR vehicle is a Closed-Cycle Hot Water Drill (CCHWD) cryobot able to penetrate up to 500 m of ice and able to transition to an actively spooled sonde upon breakthrough into the water, a vehicle architecture we term an IOP (Ice-Ocean Penetrator). The vehicle actively spools a tether — providing a vertical control capability enabling controlled breakthrough into the water body, active profiling of the lake chemistry, and re-spooling and recovery to the surface. While Ocean World applications will require nuclear power, the tether also enables THOR to be powered from the surface via high-voltage electrical power to our unique hot-water heating design able to emulate the power density of a Kilopower reactor. The full THOR vehicle will carry a sampling subsystem as well as spatial, environmental, and life-detection sensors to characterize the ice and water it transits through. This platform and sensor suite will then be used to develop and test strategies and behaviors for autonomous exploration and sampling as the vehicle descends through an ice column and into and through a subglacial water body below.
THOR is funded through the NASA PSTAR program (Grant 80NSSC18K1738).

THOR assembly at the Stone Aerospace lab in Austin, TX
Background
THOR builds upon three breakthroughs in cryobot technology achieved in the NASA-funded VALKYRIE and SPINDLE projects: Onboard closed-cycle hot-water drilling (CCHWD); small-diameter high-voltage, high-power tether technology; and high voltage fluid-resistor water heating. These concepts were tested as sub-scale assemblies in the lab or in limited field tests. THOR scales up and integrates these approaches into a high-efficiency cryobot that is sized to incorporate the Kilopower fission reactor as its thermal power source. With hot water jets in the nose and tail, THOR can melt its way both downwards through ice as well as upwards through the refrozen ice behind it. The vehicle concept is the first to incorporate a Vertical Motion Control System (VMCS) that includes onboard servo spoolers to pay out or retrieve power, communications, and strength tethers as the vehicle descends or ascends. Our goal with THOR is to conduct the first cryobot descent into a terrestrial subglacial lake. Here we present the Phase I vehicle final design, key features of the operational core CCHWD system, and the results of lab testing of a simulated 700 m continuous descent in temperate glacier ice conditions and penetration tests through ice containing tephra deposits.
Vehicle Architecture
THOR is a flight-scale cryobot based on closed-cycle hot water drill technology. CCHWD has been demonstrated to achieve a melting metric (kWH/m3 of melted ice) of approximately twice that of passive thermal probes and can penetrate glacial debris in polar regions on Earth. THOR is sized to carry the NASA 40 kWth Kilopower reactor as the thermal and electrical power source for future sub-ice missions to Europa and other Ocean World targets. THOR Phase I work focused on the design and performance of the CCHWD melt head. Currently, the Kilopower reactor is not available for terrestrial cryobot testing, so we needed to emulate the Kilopower geometry and thermal output with a nuclear surrogate.
There are three key components to the THOR power transmission approach. To create a nuclear surrogate, surface power is currently provided by a diesel generator (50 kW single phase 240 AC; the system is designed to handle up to 100 kW). Power is then routed to an up-converter that raises the voltage to 10 kV AC. Finally, a small fraction of power is converted for use by the onboard pumps, computers, sensors, and valves. The full 10 kV is used directly in the thermal power conversion module, known as HOTSHOT. The estimated descent performance in temperate ice is approximately 10 m/hour at 50 kW input power.
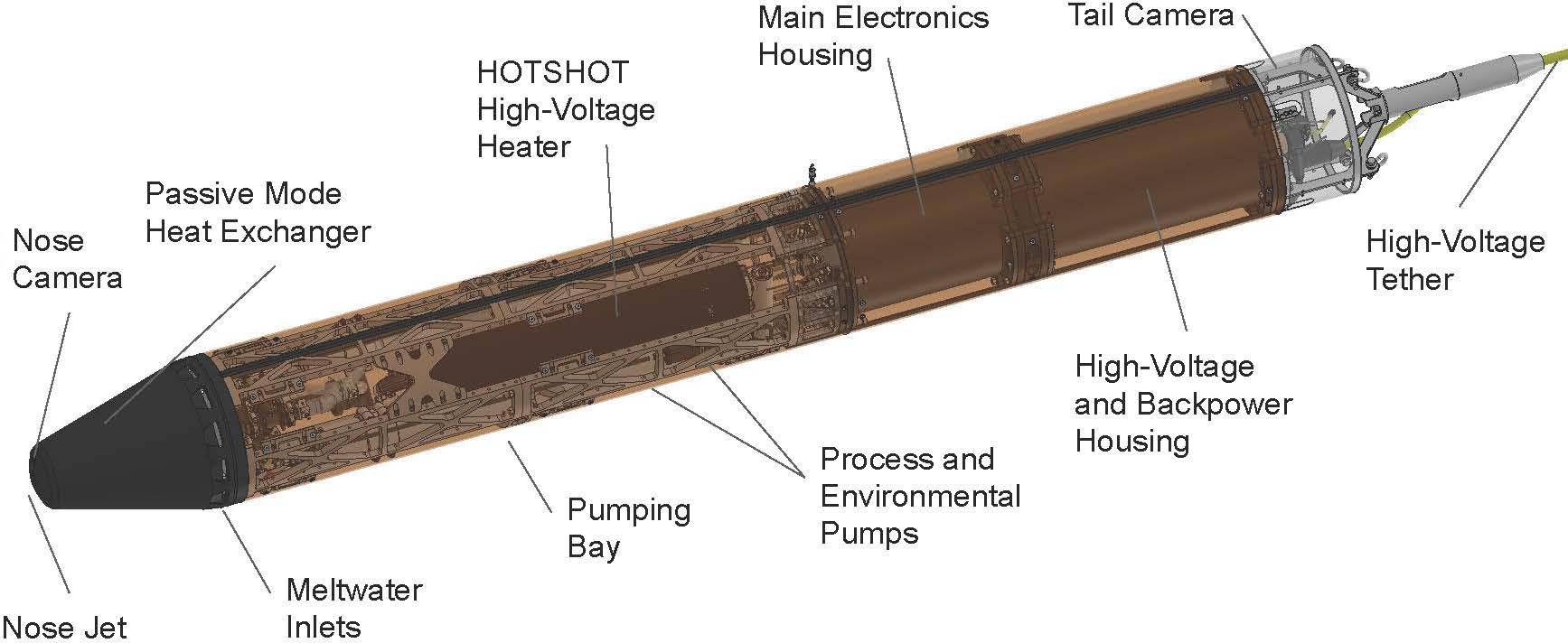
THOR Vehicle Overview
In general the cryobot descent speed will be inversely proportional to the square of the vehicle diameter and directly proportional to the ice temperature (which varies with depth) and the input power. On the basis of a kWH/m3 performance metric, THOR will compete with traditional terrestrial hot water drills in terms of speed. Its logistics footprint, however, is substantially smaller. Furthermore, bi-directional cryobots like THOR enable persistent subglacial science. Larger diameter cryobots can be used to transport, release, and retrieve science payloads as well as autonomous vehicles to subglacial aqueous environments.
HOTSHOT: Turning Lighting Bolts into Heat
The CCHWD system forms the core of the THOR technologies developed for Phase I. The goal of the system is to enable THOR to achieve high penetration rates by using high-pressure water jets to rapidly transfer heat into the ice from a novel direct high voltage heater system called HOTSHOT. The HOTSHOT technology is a critical enabler for terrestrial cryobot missions which are not able to use nuclear power sources. The HOTSHOT heater developed for THOR passes high-voltage (10 kV), low current, AC power through a moving conducting fluid. This creates resistive heating in the fluid with 100% efficiency without inducing electrolysis. Power densities as high as 600 kW/liter have been achieved with the HOTSHOT design. The overall system consists of two loops: a completely internal fully-closed process loop to allow for tight control of the fluid resistivity in HOTSHOT, and the environmental loop which heats the surrounding ice via jetting. The HOTSHOT concept has been extensively tested at Stone Aerospace and was used during the full power 72 hour burn test.
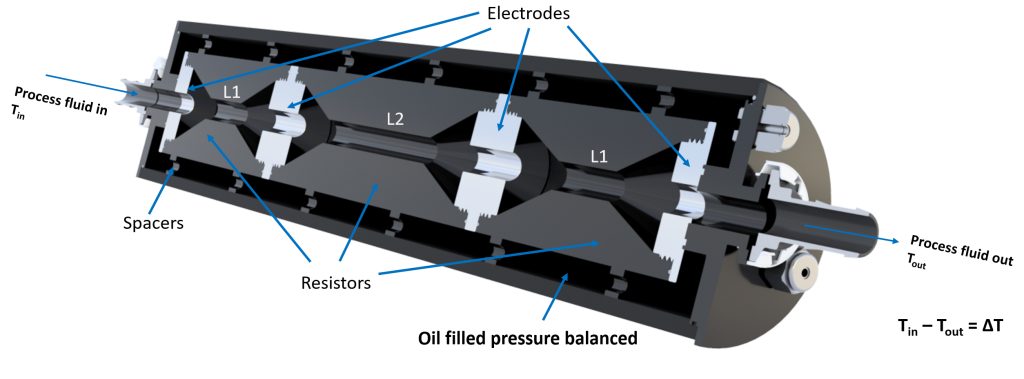
HOTSHOT System
Long-Duration Testing: Simulating an Antarctic Mission
![]()
THOR undergoing the long-duration
test, showing nose jetting.
Due to the Covid-19 pandemic, we were not able to perform field tests of THOR at the Matanuska Glacier (Alaska, USA) as we originally planned. Instead, we tested the integrated THOR CCHWD melt head at full power in a simulated long-duration mission. This Long Duration Test (LDT) simulated a 700 m ice penetrating mission by operating THOR in an insulated subzero (-0.5 C) water bath with a field-realistic power supply and high voltage (9.2 kV avg) delivery system. The vehicle achieved a peak thermal power of 45 kW and the HOTSHOT nuclear surrogate and sustained an average power of 37 kW over 72 hours of operation. The Closed Cycle Hot Water Drill (CCHWD) design delivered a 30 L/min flow from the nose jet at an average temperature 14C above the surrounding water. Optimizing the thermal distribution along the length of the cryobot is planned for Phase 2.
Cutting Through Dirty Ice
THOR jetting through sediment
We also tested the ability of THOR to penetrate “dirty” ice. A test block of ice was created in a -30 C freezer at Stone Aerospace which included a 2 cm thick layer of volcanic tephra sourced from the Grímsvötn caldera in Iceland. For safety, because closeup photos were being taken, we ran the THOR jet pumps directly using site water at approximately 18 C, rather than using the high voltage HOTSHOT unit. The main purpose of the test was to determine whether the jet pressure would be sufficient to pass the tephra layer.
The jet flow from the nose was sufficient to rapidly penetrate the debris and stir it up into a near-homogeneous mix. The debris circulated in the flow and continues to descend with the vehicle. Field tests on the Matanuska glacier in 2015 with the NASA VALKYRIE cryobot showed that lateral cutting jets could be used to create pockets for debris sequestration as well as to cause the vehicle to turn to avoid obstacles.