Rancho la Azufrosa, Aldama, Tamaulipas, Mexico
Reporting from Zacaton Basecamp
This was the big day: the first autonomous exploration of Cenote Zacaton, the main entrance to Sistema Zacaton. After a final code check at the field lab we towed DEPTHX to the 60 ton crane that lay waiting at the edge of the cenote. With no incidents the bot made it to the water surface where it was towed to the floating science station. A 500 m long 1 mm diameter fiber optic filament was connected to the vehicle to allow for data uplink during the mission. This piped live information on what the bot was seeing and thinking to two laptops on the floating platform where two team members reviewed the behavior. Following some short tests to verify basic functionality (dive, move in a straight line, return to a point and hold etc) we sent it on its way down. The platform had been moved to a location approximately on centerline of the shaft so that we could have an essentially straight drop. We were not disappointed by the data coming back: Zacaton morphed from a nearly circular 120 m diameter cenote into a rectanglular shaft, 80 m north-south by 45 m east-west. On its way down the bot went into high resolution scanning mode. Due to the axisymmetric form of the design, there is very little resistance to rotation, and hence it can emulate a surface-based scanning laser radar and produce exceptionally high resolution 3D maps. It was this capability that allowed us to paint in the walls with such graphic density (see the map images from today). At this point, at a depth of – 270 meters, two surprising things happened: first, we began to see what appeared to be a bottom to the cenote – an inclined slope leading to a deep point at the northwest corner of the cenote. Spin scanning ultimately illuminated the floor in a series of circular contours (see the bottom closeup image). The second surprise was a sudden failure in the guidance system at a depth of -250 meters during the ascent. This was manifested by a gradual divergence in the geometry data between the descent and ascent paths. Had it happened on a fully autonomous mission it could have led to the loss of the vehicle. We therefore began a detailed investigation of the causes of this failure. Prior to beginning the ascent the vehicle, while hovering at -270 m, was able to image the northwest corner to a depth of -296 m underwater, currently the deepest known point in Zacaton.

Nathaniel Fairfield reviews the final code and mission plan for DEPTHX and its first mission at Zacaton. Nearly 100,000 lines of software control the robot. Photo: (Jose Antonio Soriano / Stone Aerospace)

The bot on its transporter heading to Cenote Zacaton from the field lab. Photo: (Jose Antonio Soriano / Stone Aerospace).

DEPTHX Principal Investigator Bill Stone connects the robot to the 60 ton crane that will be used to drop the bot into Sistema Zacaton for the first time. Photo: (Jose Antonio Soriano / Stone Aerospace).

Once in the water the bot is towed over to the floating science base. Photo: (Jose Antonio Soriano / Stone Aerospace).

At the science base in Zacaton a fiber optic filament is connected which will be used to activate the mission plan; the fiber will remain connected to allow topside scientists to study the live data and ascertain if the bot is making proper decisions during the early dives. Photo: (Jose Antonio Soriano / Stone Aerospace).

The floating science platform follows the bot out (which is moving under its own power and its own program) to the point where it will begin a descent in the deepest portion of the Cenote. Once the bot submerges we can see what it sees via the fiber data link but other than observing and detecting a dangerous error by the bot, we do not intervene. Photo: (Jose Antonio Soriano / Stone Aerospace).
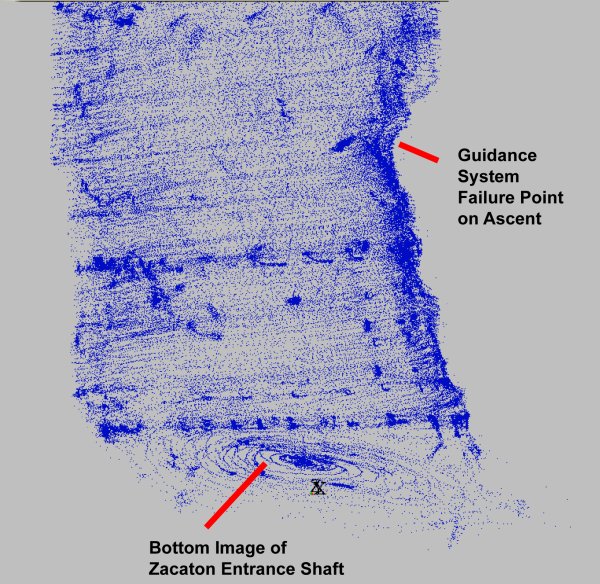
On the first mission the bot descended to a depth of 270 meters. There, beginning at a depth of 20 m below the vehicle, the presence of a sloping floor began to appear. Using its high resolution scan behavior (which involves setting the bot into a steady rotation about its vertical axis, just like a spinning top) we were able to “paint” the floor with circular scans from the down-looking sensors. The result was an unambiguous, and disssapointing, end to the entrance shaft – we had been prepared on the first mission to descend to at least -400 m; the vehicle itself is rated to -1,000 m. Photo: (Stone Aerospace / Team DEPTHX).
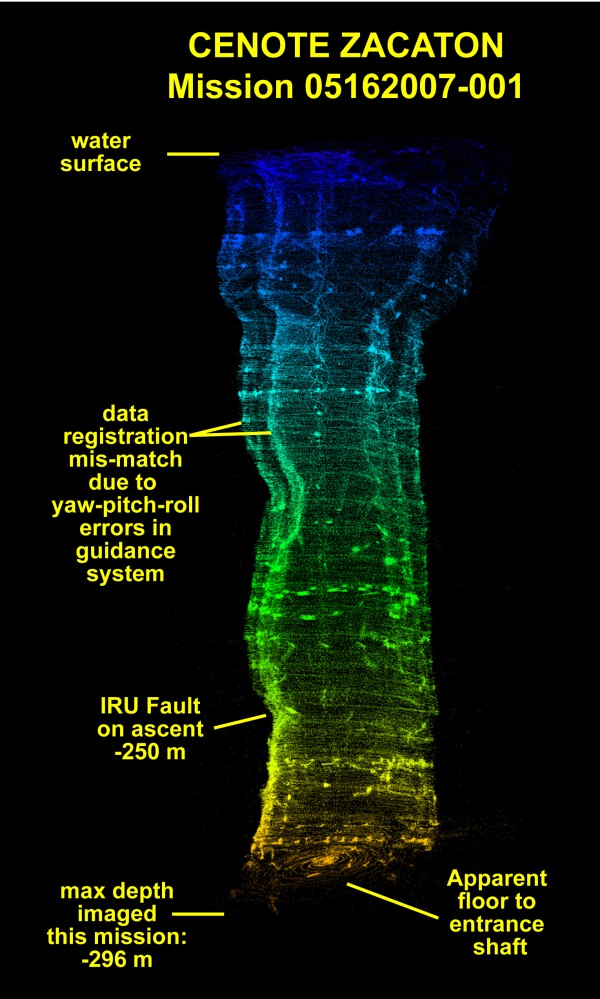
The complete map from