West Lake Bonney, Taylor Valley, Antarctica
Reporting from East Lake Bonney Basecamp
Although ENDURANCE is an autonomous underwater vehicle (AUV)—it has several independent onboard navigation systems and auto-return and docking behaviors and can be programmed for entirely “hands-off” missions; in addition it contains its own redundant power supplies and is self-sufficient for up to 10 hours on its own—we have found over time the enormous benefit of a fiber optic data link to mission control. On deep space missions NASA enjoys the benefits of seeing (in delayed real-time, due to the transit speed of light) the responses and actions of its deep space probes and can upload revised mission plans if problems are foreseen, or, more importantly, if new science is detected in the data stream so that the vehicle can take a closer look. For identical reasons, the science coming from Lake Bonney ranks #1 on the priority list of what we are here to achieve and we have found it prudent (given the investment in the vehicle) to look over the shoulder of the bot during most missions.
Underwater, however, bandwidth is limited and the only way to see real-time data—especially the torrents of geometry data coming from a vehicle like ENDURANCE—is through fiber optics. Thus we trail out a thin data filament on all missions. The new ENDURANCE “situational awareness” 3D visualizer was built around this capability and it has allowed us on many occasions already to catch new features and to immediately investigate them during the course of an ongoing mission.
This capability comes with a price in a sub-glacial environment, namely the possibility of fiber snagging. Lake Bonney has an unusual constituency: under the 3 to 4 meter thick ice cap is a 10 meter fresh water lens riding on top of a 27 meter thick, ancient, hypersaline layer. The buoyancy of that layer is sufficient to cause a vehicle like ENDURANCE (ballasted to free-fly in the fresh water lens) to bob like a cork on water. Within this restricted domain we had three choices in the design of the data fiber: to have it sink and float on the salt layer; to have it neutral and free-float in the fresh water lens; or to make it positively buoyant and float under the ice cap. The middle option was ruled out due to the possibility of it wrapping up on the vehicle. But we did come equipped to work either of the other scenarios. Fortuitously, it turns out that the underside of the ice cap at Bonney is glass smooth in almost all localities except for some notable pressure-ridges near the glacier, and so we have successfully operated using the floating fiber approach. There are, however, several permanent science monitoring experiments near the center of the lake that are used by the LTER program and these have cables that run the entire depth of the lake. They constituted enough of a fiber snag concern that during 2008 we designated the “shadow” area (see map) behind the limnological experiments to be a “no fly” zone. This year we came prepared to scan the entire lake.
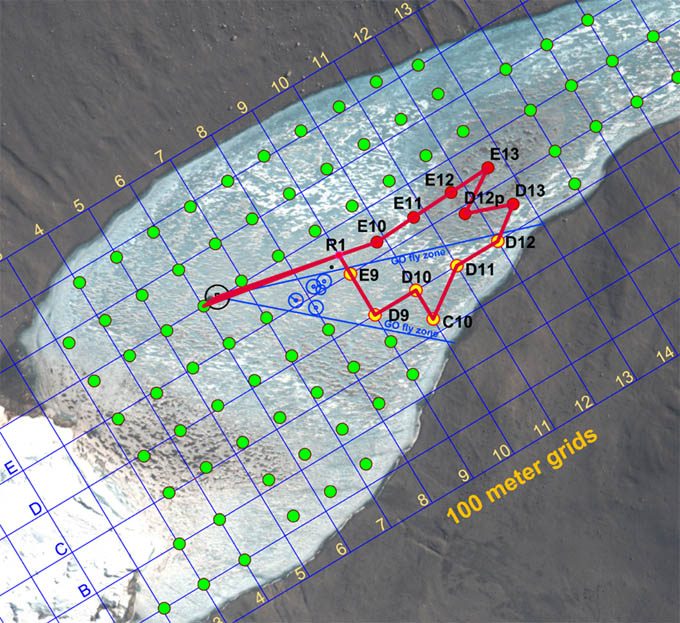
The November 17 mission plan took the bot into last year’s “no fly” zone to achieve full lake sonde cast coverage. To do so we employed a fiber diverter (the small black circle adjacent to R1).
The concept was simple enough: sink a 100 mm diameter smooth wall PVC tube through the ice cap so that it projected out approximately 3 meters below the underside of the ice and strategically divert the fiber away from the known obstacles. After selecting this point in the mission planner Vickie tracked out and marked it using GPS. Peter Doran then took responsibility for placing the tube (the location can be seen in the two figures as a small black dot just northeast of the obstacles, shown as blue circles). The procedure involved using a “jiffy” drill to make the hole and then lowering the tube on a piece of parachute cord to the precise depth. By 11am we received the cryptic radio message “Diverter King to Bot Garage. Mission complete,” meaning the tube was in place.
Today was a sunny, windless day, so we took the opportunity while the pre-launch checklist was being run to collect GPS fixes for some previous sonde casts (E14, E15, E16, E17, E18, E19, E20, F10, F11, F12, F13, F14, F15, F16, F17, F18, F19, G11, G12, G13, G14, G15, G16, H11, H12, H13, D14, D21). The bot launched at 2:45pm with the initial waypoint being R1, just 30 meters north of the diverter tube. We took the opportunity to navigate over to the tube for a visual inspection (see figure) as well as to verify the sonar image of the limno cables (our adversary today) then continued on with the pre-programmed mission to the final sonde casts for the general lake set in 2009: E10, E11, E12, E13, D12p, D13, D12, D11, C10, D10, D9, E9, F6.

From waypoint R1 we navigated back to the diversion point (30 meters away) to verify the status of the tube. Since all gear coming to our site is flown by helicopter, the MEC shop sent the tube out in sections. The tube is actually suspended from its bottom by a length of parachute cord inside the tube and gravity holds the pieces together. We duct-taped the joints, however, to prevent a fiber snag.
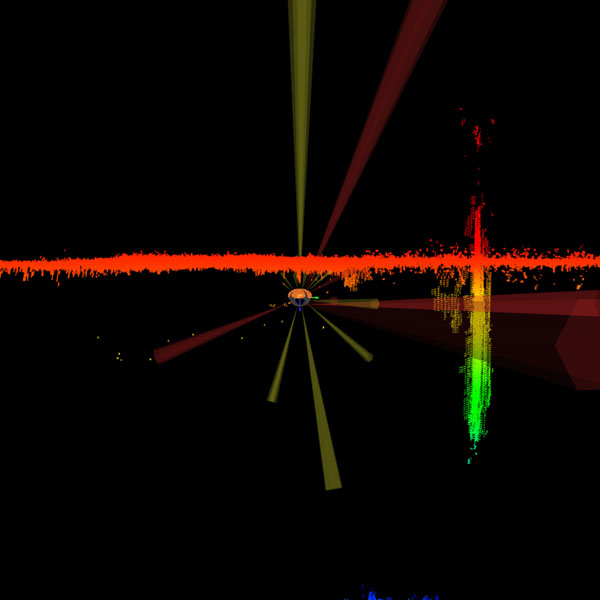
The multi-beam scan clearly showed the presence of the limno sediment trap cables extending the full depth of the lake, just behind the diversion tube.
The mission proceeded flawlessly. Run length was 1803 meters over 5 hours and 20 minutes, with 42% power remaining when the bot rose up the melt hole—all predicted within a few percent by the mission planner, which Bart Hogan had meticulously calibrated to recorded performance data prior to his departure. Also, the new balancing procedure developed for the batteries indicated that all but 3% of the theoretical maximum power was accessible. And the diverter tube concept had worked. This gave us ideas for a mission none of us believed possible before today.

Vickie listens for the approach of the bot to station R1 during the November 16 sonde mission. On a long approach to the first point in a grid, the tracking team can estimate the location where the bot will be and drive there (using an ATV). By orienting the radiolocation coil horizontally and using a digital phase-locked loop receiver, it is possible to detect the approach or recession of the field. Two people using these in orthogonal directions can predict the arrival from almost 200 meters out.

The tracking team at station D9, the point of maximum angular incursion into the previous “no fly” zone.
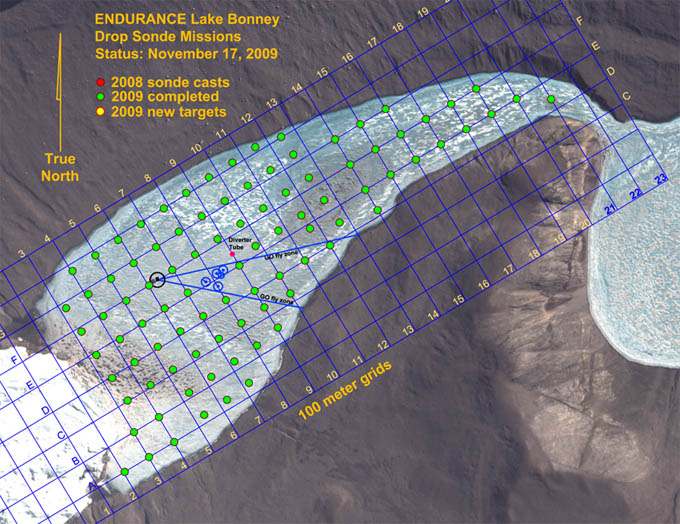
As of the conclusion of the November 17th mission the entirety of West Lake Bonney was sampled, bringing to fruition the concept developed five years earlier by Peter Doran and Bill Stone—that a robot could do with repeatable precision what no dedicated field limnological team could achieve: the full 3D aqueous chemistry characterization of an entire sub-glacial lake in a single season.
Reporting by Bill Stone