Thanks OpenROV!
Our friends at OpenROV have kindly lent us two OpenROVs for use during our expedition. What is an OpenROV you ask? OpenROV is an open-source, affordable, remotely operated underwater robot aimed at making underwater exploration accessible to everyone, as well as a vibrant DIY community dedicated to the collaborative development of this platform and inspiring people with all backgrounds to get their feet wet and explore.
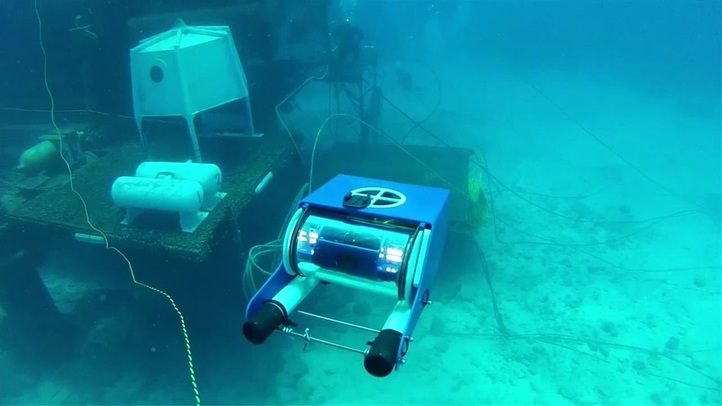
OpenROVs are built by researchers, students, schools, and backyard tinkerers to uncover the mysteries of our watery world (photo: OpenROV).
OpenROV’s mission is to bring the magic of underwater discovery to everyone, not only research or industry groups with access to expensive ROVs or AUVs, and to encourage citizen science and democratize underwater exploration. With two cutting edge AUVs at our disposal and the logistical backing of the United States Antarctic Program, we obviously have a little more underwater exploration firepower than the average OpenROVer, but that does not mean the OpenROVs will not be extremely useful to us. We plan to use them as low-cost “expendable” observation platforms to scout out situations where we are not yet ready to risk sending in a diver or SUNFISH. For example, if ARTEMIS gets stuck under the ice and we are having difficulty recovering her, we can send an OpenROV to perform initial reconnaissance of the situation. We also hope to use the OpenROVs to provide better situational awareness of critical operations near the borehole, as well as capture sweet footage of the other robots working under ice.

OpenROV and ARTEMIS pose together at Stone Aerospace HQ. (photo: Evan Clark)

Bill rocks a red OpenROV beanie. (photo: Evan Clark)
Before leaving for Antarctica, I had a chance to take one of the OpenROVs for a quick dive / systems checkout at a local pond.
Reporting by Evan Clark