Forward Momentum
We made some great strides with ARTEMIS yesterday. Buoyancy trim is still not perfect (ARTEMIS has a slight lean to starboard), but after Saturday’s adjustments, the vehicle was sitting level enough yesterday that we were able to perform a 10 hour dive with some exciting results. We:
- drove ARTEMIS around under the sea ice near our camp
- tuned autonomous control loops and tested our new buoyancy-compensating feedforward control
- tested scripting of autonomous motions
- localized ARTEMIS from the surface using the magnetic tracking system
- displayed live science telemetry in the bot house
- docked ARTEMIS to the lighted docking bar under joystick control
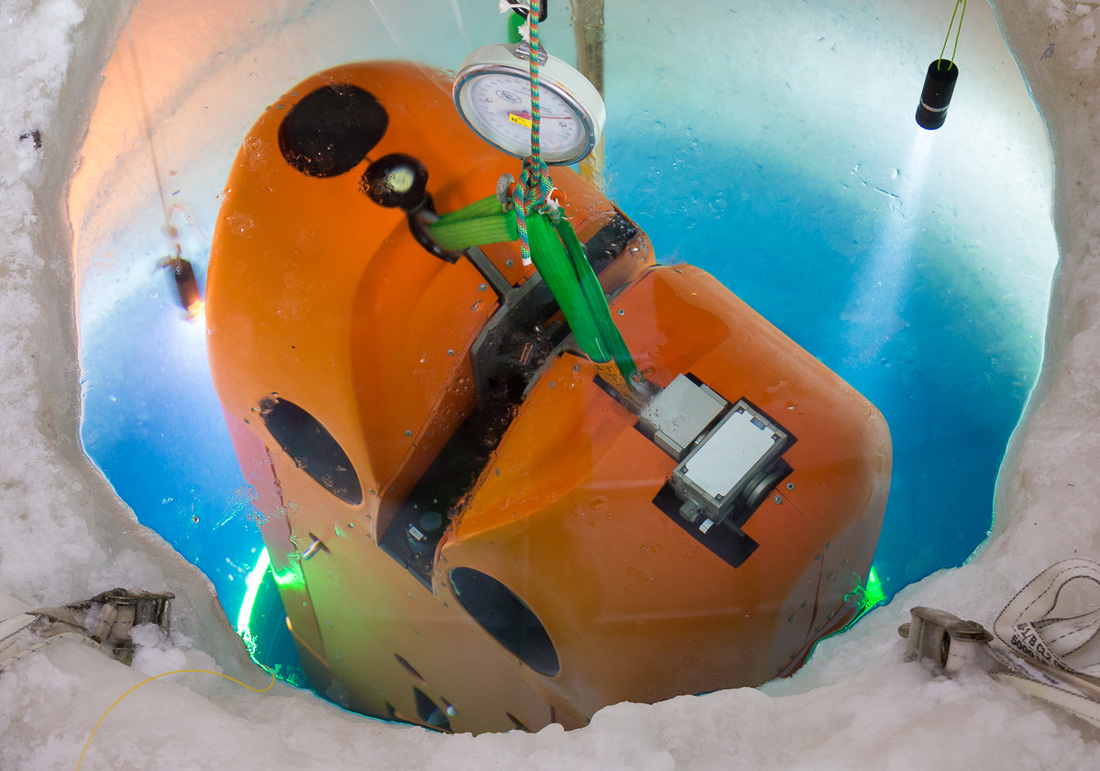
- recovered ARTEMIS to the surface using the docking bar rigging
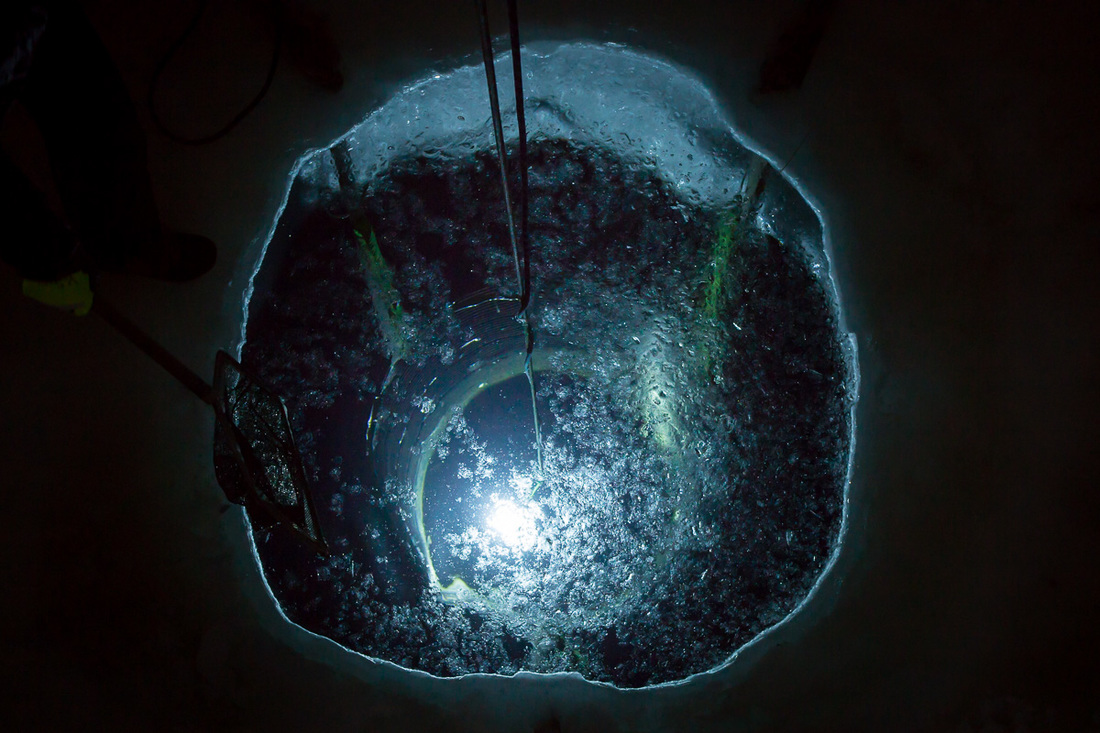
Here are some photos of the surface tracking operations led by Brian. Brian was pleased with the tracking system performance through the ice, and was able to localize ARTEMIS even at 35 m water depth. In these pictures, try to imagine 7 m of sea ice and brash ice underneath the feet of the tracking team, with ARTEMIS at 35 m water depth, and the bottom of the Ross Sea 700 m below.
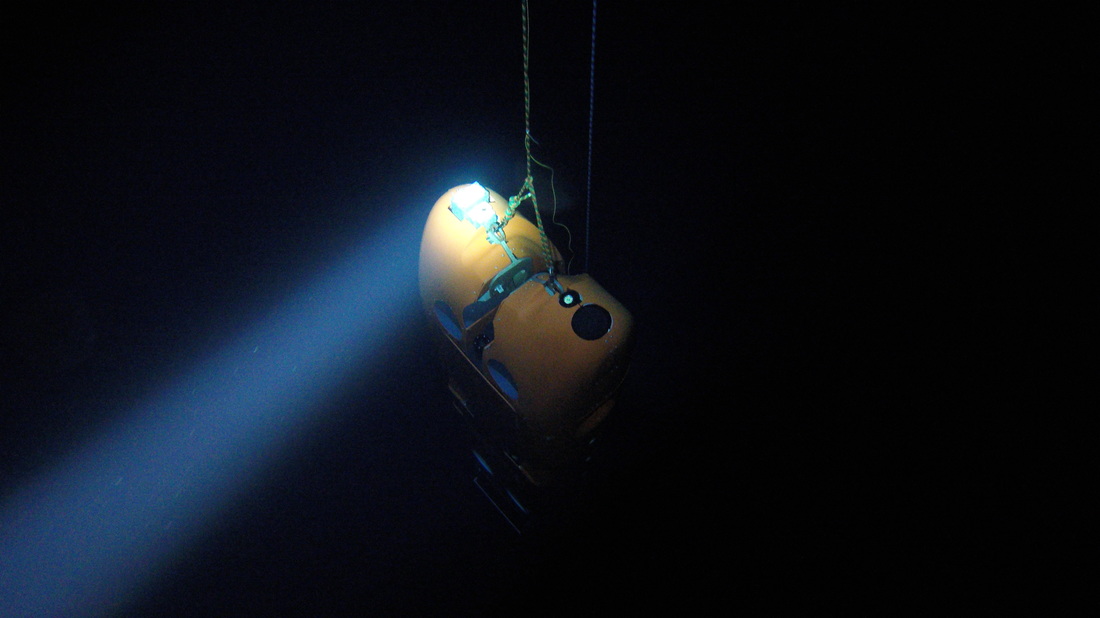
The docking bar test was very exciting. I was “at the wheel” driving ARTEMIS onto the bar. The system worked very well, and now we’ve got our first set of images of the docking bar under ice as seen by the actual ARTEMIS cameras. Evan is using these images to validate our automated visual docking system. The first fully-automated docking run will be a real milestone for our project, and we feel it getting very close. Here are some views from the ARTEMIS camera of the docking bar during our piloted approach and docking run.
Since the docking bar hangs straight down through the culvert (and is covered in super-bright LEDs), we can see ARTEMIS attached to it from the surface.
With so many exciting steps taken, group morale was very high at the end of yesterday’s dive. However, we are now feeling serious schedule pressure. As the austral summer advances, the sea ice beneath our camp will break up and blow out to sea. We have ambitious goals and only a few precious weeks remaining here on the ice.
Reporting by Peter Kimball