Another Sunfish Dive From The Fish Hut
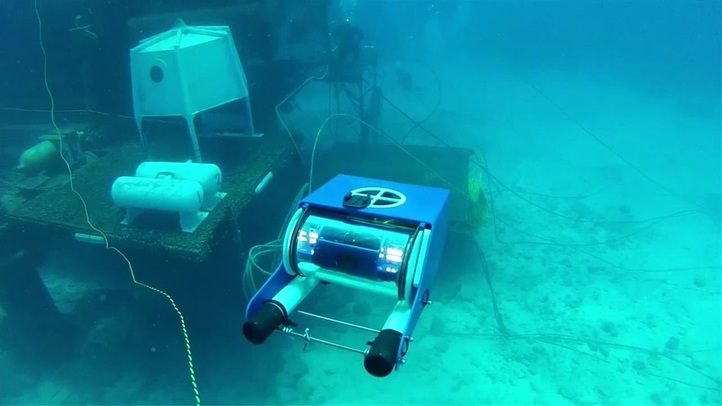
We all headed out onto the sea ice yesterday morning. Chris, Josh, Justin and I took Sunfish out to the fish hut while the others got in some work with our snowmobiles (now available to us as nicer weather and more vehicle maintenance support are available). Britney, Chris, Justin, and I stayed out at the fish hut and dove Sunfish to test out some new software that Chris and I have been working on.
The dive was very productive from a software standpoint, but we were very excited to be greeted by some new visitors to our drill hole: Pagothenia borchgrevinki. Some of our biologist friends here told us about these fish when we first saw them in large numbers beneath the shelf edge. It was very cool to see these ghostly fish up close in our drill hole.
Some more fun pictures from the day include a status update on the bot house construction (ongoing next to our fish hut) and some shots of Chris and me operating Sunfish in the fish hut

Bot house construction progress has been halted for a few days due to high winds on the sea ice. The next step will be to put the fabric insulation and coverings on. (photo: Peter Kimball)
Reporting by Peter Kimball