West Lake Bonney, Taylor Valley, Antarctica
Reporting from Blood Falls Basecamp
Today we took a day off!
Reporting by Vickie Siegel
Smart tools and systems for exploring the frontier
Today we took a day off!
Reporting by Vickie Siegel
Today we shifted gears from running sonde drops at grid points to mapping the face of the Taylor Glacier. The glacier ends at the head of West Lobe Bonney and the face of it extends down below the surface of the lake. Peter is interested in getting a 3D sonar map and, if possible, photos of the underwater glacier face.
We spent the morning re-arranging some of the sensors on the vehicle. During the profiler missions we had our multibeam “DeltaT” sonar facing downwards to map the lake floor as we went from point to point. For the glacier missions, we want the DeltaT to face the vertical glacier wall, so we mounted it sideways on the front of the vehicle. We also moved the horizontal camera and HID lights to face the same direction as the DeltaT, also on the front of the bot; previously they faced out from the aft direction of the vehicle to help us avoid obstacles as we drove the sonde from point to point.
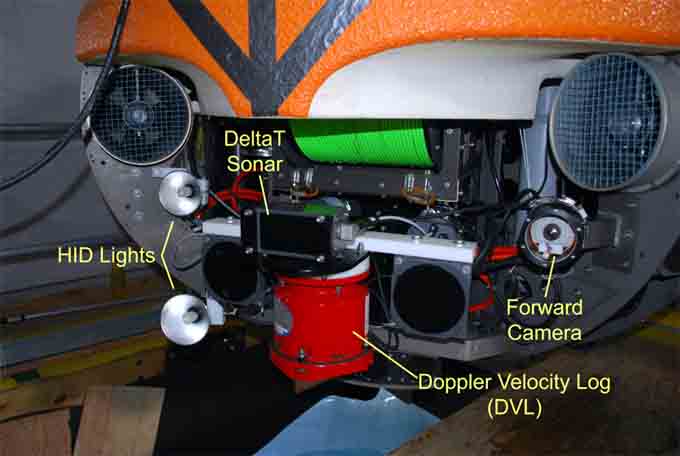
The HID lights, forward camera, and DeltaT sonar were all placed on the front of the vehiclefor the glacier-mapping missions.
We were worried that we would snag the fiber close to the glacier because the lake ice is somewhat broken up there and there are large icebergs sticking up out of the lake ice. Trying to avoid this, we drafted a mission plan where we would drive up to the glacier face, spin the vehicle slowly to get a sonar scan, and then retreat along the same line we approached on. Then we would move sideways 25 meters, approach, scan, and retreat again. The resulting mission plan looked like a dinner fork, where each tine was an approach and retreat. It was not an efficient use of battery power but we hoped it would keep the bot from looping the fiber optic line around any obstacles out there. The northernmost section of the glacier face looked the most straightforward and hazard-free, so we decided to start there.
We started to run the mission and as the bot approached the glacier, it became evident that somehow either the data on the mission plan map or in the bot’s navigation was incorrect. The coordinates that should have had the bot right against the glacier actually left the bot about 20 meters short of it. Bill and Vickie, who had been tracking the bot, hopped on the ATV to drive back to the Bot House and draft some extended coordinates. However, in the last few days, thanks to the warm weather we’ve been enjoying, the surface of the lake ice has morphed dramatically and the ATV got stuck in a water-filled ditch on the rough ice, leaving them soaked and walking back to the Bot House. Armed with an ice screw and some cargo straps, Maciej went out to retrieve the ATV as Vickie drafted new coordinates and Bill changed into dry clothes.
With the new coordinates the bot approached the glacier as originally intended and the sonar scans reported good data. Bill and Vickie continued to track the vehicle until Vickie suddenly broke through a layer of ice, getting wet to her knees, at which point they decided the ice near the glacier was too instable to follow the bot any further out.

As the weather get warmer, the lake ice gets rougher and rougher. This makes tracking a slower process.
The folks at mission control were getting enticing images from the horizontal camera so they decided to approach the face a little closer to get more footage. When they did so, the bot unexpectedly bumped into an ice ledge, which knocked out the readings from the DVL (Doppler Velocity Log). The DVL is a key sensor in the bot’s navigation system so if it loses lock momentarily the bot becomes entirely disoriented, even after it regains lock. So now, with the bot in a place where we could not track it, the bot didn’t know where it was. Luckily, Chris was able to watch the sonar feedback and camera images and manually drive the bot away from the wall. The programmers estimated how much the bot might have drifted before the DVL regained lock and sent the bot an estimated location and told it to navigate back to the last point flagged by the tracking team. As it approached this flag, Bill and Vickie tracked the bot and reported the error, a few meters, in the bot’s calculation of where the flag was. Mission control reset the location using this groundtruth data and sent the bot home.

The forward camera took this image of the ice ledge the bot bumped into near the glacier.
To make matters even more interesting, by now the batteries were getting low and the bot was still several hundred meters from the melt hole. In addition, the visibility in the water had been decreasing all day and by this point in the mission, the water was quite murky. The warmer weather has been melting the glacier ice and there is now a waterfall blasting out a tremendous amount of water from the glacier face into the lake. Also, the flow in the Santa Fe stream next to our camp has increased. This influx of water is stirring the lake up and carrying in very fine-grained sediments. The result is that the crystal clear water we saw this morning is now a milky stew. The loss of visibility means that the visual homing program, where the bot follows a blinking light up the melt hole does not work because it is not be able to see the light.

Water has started gushing out of a 3-meter wide hole in the glacier face. The waterfall is about 10 meters high.
The visibility in the water has suddenly dropped from almost unlimited to about 30 cm.
Exhausted from the stressful mission, we resorted to our recovery strategy of tugging the bot in by its tether. We navigated to within a few meters of the melt hole and then Kristof slowly and carefully pulled the fiber optic line. To everyone’s relief, we soon saw a dark shadow rising up through the murk. In a few seconds the shadow became an orange blob and then the bot was home.
Upon closer inspection we were happy to find that the bot suffered no major damage from its bump into the wall. The DVL bumped the ice shelf directly but none of the sonar transducers on it were scratched, and the HID light mounted just to the left of the DVL had been bumped and was aiming upward, but it was not even dented.
Despite the chaos today, we had a successful mission. We navigated to the glacier face for the first time, got a lot of sonar data and images, and navigated home. A few more data collection runs from the glacier face and we will have accomplished our objectives here at Lake Bonney.
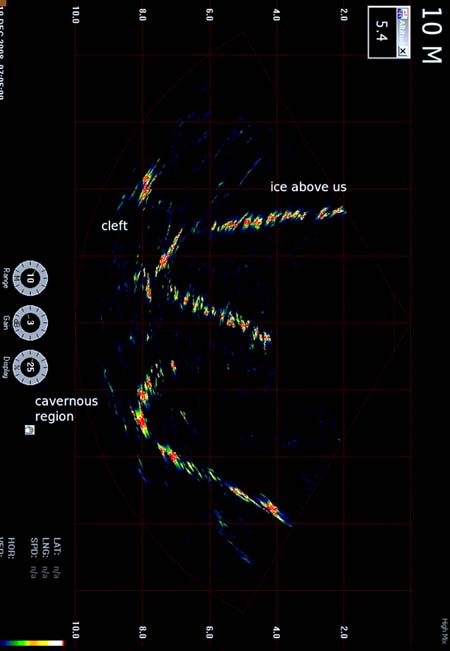
This is a screenshot of the live feedback from the DeltaT sonar. It shows a profile view of the glacier face at this point. The top horizontal stretch is the ice at the lake surface; below that, the glacier wall starts as a curve on the left; the middle point is a ledge jutting out and below that the wall recedes again. Mission control found this pattern common.
Reporting by Vickie Siegel
While yesterday’s mission was pretty long and took us far from home, the plan for Mission 7 was even more aggressive today—1730 meters long, and again about 700 meters straight-line distance from the Bot House. Also we would be operating close to shore again. The north shore of the lake is a steep talus slope that tops out in a large cliff face about 600 meters vertical distance above the lake. This slope is littered with huge boulders and it seemed quite likely that the slope under the ice would have some big rocks, too—hazards for the bot. So, just like the start of every mission, we had some reasons to be a little nervous.

Vickie poses next to Potato Rock on the north shore of West Lobe Lake Bonney.It is rocks like this that had us worried about bringing the bot close to shore in this area of the lake.
We topped the batteries off, dropped the bot in the water and started off. Vickie and Bill tracked the bot as it traveled between sonde points. The phono plug on one of the beacon receiver headsets broke about halfway through the mission and since time is of the essence with these longer missions, Kristof hopped on the ATV and raced out to the tracking team to give them a replacement headset so that there would be no delay in locating the bot.
As the bot approached the north shore in the second half of the mission, mission control kept a close watch on the water depth and the obstacle avoidance sonars. As predicted, we encountered a large rock on the bottom that was big enough to halt our progress to shore. We did the sonde drop from the safe point we stopped at and then proceeded parallel to the shoreline, approaching more closely once we passed the rock.

The sonde camera took this image of a large rock near the north shore. It was about two meters tall.We avoided this obstacle and happily didn’t find any others.
In no time the bot had run through the remaining sonde points without further incident. On the 350-meter journey back to the Bot House, we ran the bot on a course parallel to and 30 meters offset from the path it took out in the morning. This provides us with a patch test for the multibeam sonar, basically calibration data we can use when we post-process the sonar data.
The bot made it home safe and sound. With the exception of a couple of sonde points we might grab later when we are running missions to the glacier face, we are done with all of our 2008 sonde point targets; we have succeeded with a large part of our job here this year and our spirits are high today. Tomorrow we start on another objective: mapping the glacier face.
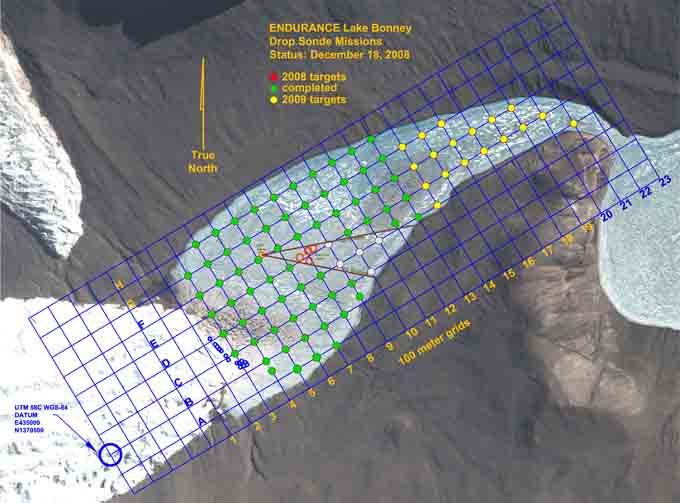
Our status at the end of Mission 7. We have hit all of our sonde targets for this year!
Reporting by Vickie Siegel
Now that we have our act together on these profiler missions, it is time to do the riskier missions. In our previous missions we have picked off almost all of the nearby, easy grid points and now we have to go further out. The mission plan for today was a 1620-meter long loop, with 11 grid points. It’s the farthest distance we’ve planned to traverse, by over 100 meters. According to Bart’s mission planning worksheet, it cuts into our reserve battery power. We decided that if we are very efficient with our launch procedure, we should have enough battery power to run the mission safely. The second concern is the sheer straight-line distance from the Bot House to the furthest point on the plan, 704 meters. If the fiber gets caught that far out, we don’t have enough fiber to drive it all the way back still connected. Everything needed to go right today.
We got off to a good start, getting the bot into the water quickly. The buoyancy, which mysteriously changes a little bit from day to day, was adjusted and looked good. Just before diving the bot down to the bottom of the melt hole, we noticed a small white object in the vertical thruster mesh. Since we didn’t want this foreign object to interfere with the thruster, Maciej got into a harness and leaned out over the bot to pick the object out of the mesh – it was a small chunk of syntactic that must have broken off. We took the bot down under the ice, went through the rest of our launch checklist and the bot started off to the first point for the day. When it got there, the ice-picking maneuver, where the thrusters turn off and the bot floats up to rest against the ice ceiling, didn’t work. With the thrusters off the bot was slowly sinking instead of rising. Somehow, the buoyancy was off. Given our tight battery budget for the mission we could not afford to keep the thrusters on to hold the bot against the ceiling, nor could we dally, find some other solution and then continue on the mission. The only choice was to go straight back home, take some lead off the bot and then recharge the batteries to full capacity and start the mission over.

Just before launch, Maciej leans out over the bot to remove a small chunk of syntactic that has broken off and become stuck in the mesh above one of the vertical thrusters.
The bot’s buoyancy in Lake Bonney has consistently been a bit of a pain. One would think that if we could get the buoyancy just right one day then, with no changes to the ballast or the bot, the buoyancy should be the same the next day, but that has not been the case. There are probably several factors in play here: the bot’s temperature when it goes into the water, the water temperature and density in different parts of the lake, microbubbles and so on. For this reason, we’ve been in the habit of checking the ice-picking maneuver right at the beginning of every mission, just beyond the melt hole. Today the ice-picking worked during the launch check but wasn’t working at the grid point. We couldn’t establish a cause for this problem so we decided to just deal with the situation by removing two pounds of lead.

With the batteries back on charge after our aborted launch,Bill works on adjusting the bot’s buoyancy for round two of today’s mission.
After we had charged the batteries for a few hours we were back to full charge and ready for Take Two of our mission. This time we were able to launch the vehicle in even less time and in a flash we were cruising back out to the first grid point on our mission plan.
This time the bot ice-picked normally, we did the sonde drop and were off to the next point. By this time in our field season here, all of our repetitive tasks have become second nature. Chris, Shilpa and Kristof are able to do sonde drops more efficiently now and Bill and Vickie have no trouble keeping up while tracking the bot and flagging the sonde drop points.

Bill tracks the bot’s radio beacon with a loop antenna while pulling a sledwith the flags and kovacs drill needed to mark the sonde drop points.

Bill drills a hole in the ice for the bamboo pole that will flag this sonde drop point.
On the return leg of the loop there was a moment of concern when the fiber appeared to be caught, but a short dive with the bot cleared up this problem. When the bot returned to the Bot House, we still had several amp-hours of battery life left, more than we expected. What’s more, today the bot went as far away from the melt hole as it will go in Lake Bonney and it returned home successfully.
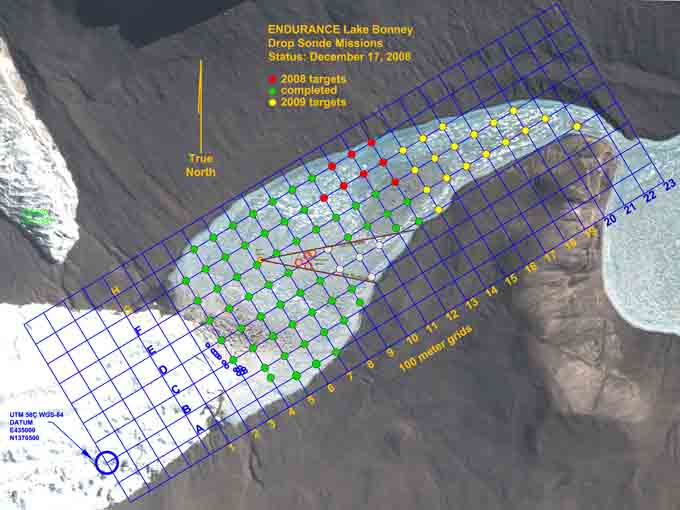
Our status at the end of Mission 6. The grid is almost done.
Reporting by Vickie Siegel
Today’s profiler mission, Mission 5, took us towards the lake shore south of the Bot House. Our aim was to fill in the gap between where we had gone on Mission 3 and our keep-out zone. The keep-out zone is the area around John’s limnology tent, where we know there are active experiments hanging down into the water. To avoid entangling the bot or disturbing the experiments with either the bot or the fiber, we’ve had to designate a wedge of the lake as a keep-out. Unfortunately this wedge means that there are a few grid points that we won’t be able to get to, even though they are within our range.
We ran through our launch checklist and dropped the bot in the water. The weather was much nicer today and the mission went quickly and cleanly. There was some worry that, even with our conservative stand-off distance from the limno tent keep-out area, we might snag something under the ice on our way back to the Bot House, but Leah reported that the fiber was feeding back in as it should and the bot came home without incident.
![]()
Going through the launch checklist, Bill inspects the o-rings before sealing up the radio beacon battery compartment.
Later that day, Maciej returned to the Bot House carrying a long pipe. He had spent the afternoon working around the limno tent and had encountered one of the experiments that defined a part of our keep-out zone, an ablation stake. It had ablated out of its spot in the ice and was lying on the surface, so he removed it. While there are still experiments to avoid in the keep-out zone, it is nice to know that there is one less object in the lake to trip us up.

Maciej returns to the Bot House with one of the obstacles we have been avoiding near the limno hut, an ablation stake that has ablated out of the ice. It may be an object like this that snagged us a few days ago.
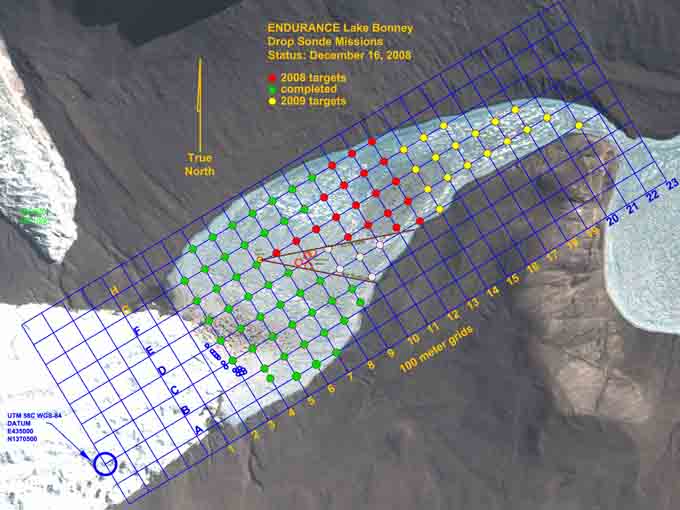
Our status at the end of Mission 5.
Reporting by Vickie Siegel