Rancho la Azufrosa, Aldama, Tamaulipas, Mexico
Reporting from Zacaton Basecamp
The Full Scoop

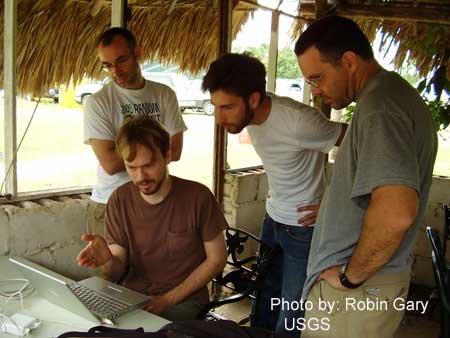
Dom watches as the robot is lowered into La Pilita with two scooper attachments that will be used to sample bottom sediment.

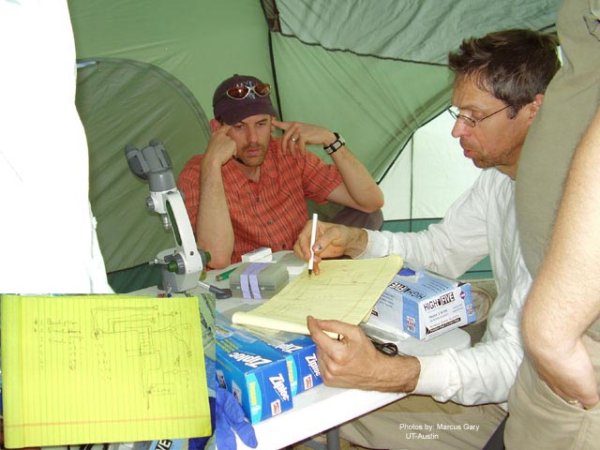
The robot buried the scoopers in the bottom sediment then spun to take a sample. The procedure worked so well that the amount of sample taken made the robot slightly negative.